|
MAV'RIC
|
|
MAV'RIC
|
Classes | |
| struct | args_t |
| Required arguments. More... | |
| struct | conf_t |
| Attitude controller configuration. More... | |
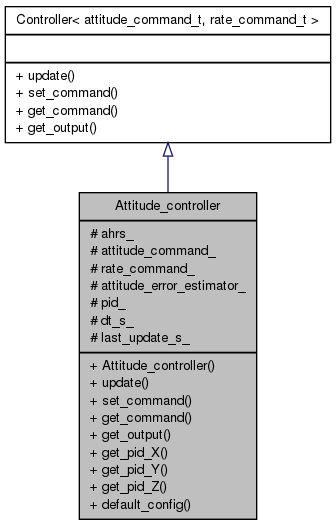
Public Member Functions | |
| Attitude_controller (const args_t &args, const conf_t &config=default_config()) | |
| Constructor. | |
| bool | update () |
| Main update function. | |
| bool | set_command (const attitude_command_t &command) |
| Sets the input command. | |
| bool | get_command (attitude_command_t &command) const |
| Returns the input command. | |
| bool | get_output (rate_command_t &command) const |
| Returns the output command. | |
| pid_controller_t & | get_pid_X (void) |
| Gives acces to internal pid_controller. | |
| pid_controller_t & | get_pid_Y (void) |
| pid_controller_t & | get_pid_Z (void) |
Static Public Member Functions | |
| static conf_t | default_config () |
| Default Configuration. | |
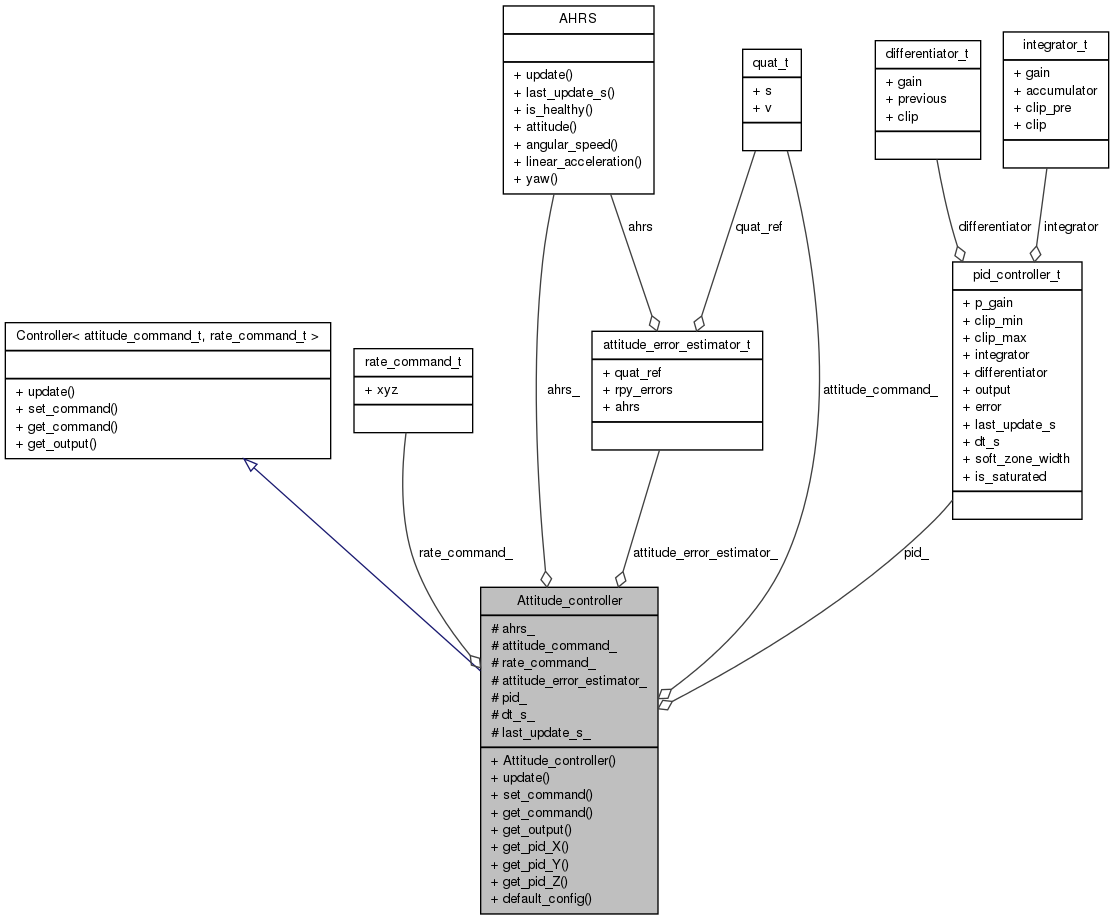
Protected Attributes | |
| const AHRS & | ahrs_ |
| Ref to attitude estimation (input) | |
| attitude_command_t & | attitude_command_ |
| Reference to attitude command (input) | |
| rate_command_t & | rate_command_ |
| Reference to rate command (output) | |
| attitude_error_estimator_t | attitude_error_estimator_ |
| Attitude error estimator. | |
| pid_controller_t | pid_ [3] |
| Attitude PID controller for roll, pitch and yaw. | |
| float | dt_s_ |
| The time interval between two updates. | |
| float | last_update_s_ |
| The time of the last update in s. | |
| Attitude_controller::Attitude_controller | ( | const args_t & | args, |
| const conf_t & | config = default_config() |
||
| ) |
Constructor.
| args | Required arguments |
| config | Configuration |
| Attitude_controller::conf_t Attitude_controller::default_config | ( | void | ) | [inline, static] |
Default Configuration.
/return config
| bool Attitude_controller::get_command | ( | attitude_command_t & | command | ) | const [virtual] |
Returns the input command.
| command | Input command |
Implements Controller< attitude_command_t, rate_command_t >.
| bool Attitude_controller::get_output | ( | rate_command_t & | command | ) | const [virtual] |
Returns the output command.
| command | output command |
Implements Controller< attitude_command_t, rate_command_t >.
| pid_controller_t & Attitude_controller::get_pid_X | ( | void | ) |
Gives acces to internal pid_controller.
| bool Attitude_controller::set_command | ( | const attitude_command_t & | command | ) | [virtual] |
Sets the input command.
| command | Input command |
Implements Controller< attitude_command_t, rate_command_t >.
| bool Attitude_controller::update | ( | void | ) | [virtual] |
 1.7.6.1
1.7.6.1

