|
MAV'RIC
|
|
MAV'RIC
|
Classes | |
| struct | conf_t |
Public Types | |
| enum | internal_state_t { STANDBY, PREMISSION, MISSION, POSTMISSION, PAUSED, MANUAL_CTRL } |
| enum | critical_behavior_enum { CLIMB_TO_SAFE_ALT, FLY_TO_HOME_WP, HOME_LAND, CRITICAL_LAND } |
| The critical behavior enum. More... | |
Public Member Functions | |
| Mission_planner (INS &ins, const AHRS &ahrs, State &state, const Manual_control &manual_control, const Geofence &geofence, Mavlink_message_handler &message_handler, const Mavlink_stream &mavlink_stream, Mavlink_waypoint_handler &waypoint_handler, Mission_handler_registry &mission_handler_registry, conf_t config=default_config()) | |
| Initialize the waypoint handler. | |
| bool | init () |
| bool | write_flight_command (Flight_controller &flight_controller) const |
| Provides control commands to the flight controller. | |
| void | set_critical_next_state (bool critical_next_state) |
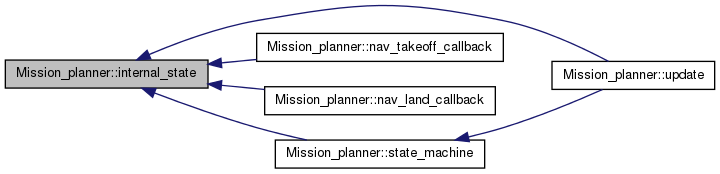
| internal_state_t | internal_state () const |
| Gets the internal state. | |
| critical_behavior_enum | critical_behavior () const |
| Returns the critical behavior. | |
| bool | switch_mission_handler (const Waypoint &waypoint) |
| Switches the mission handler to the inputted waypoint. | |
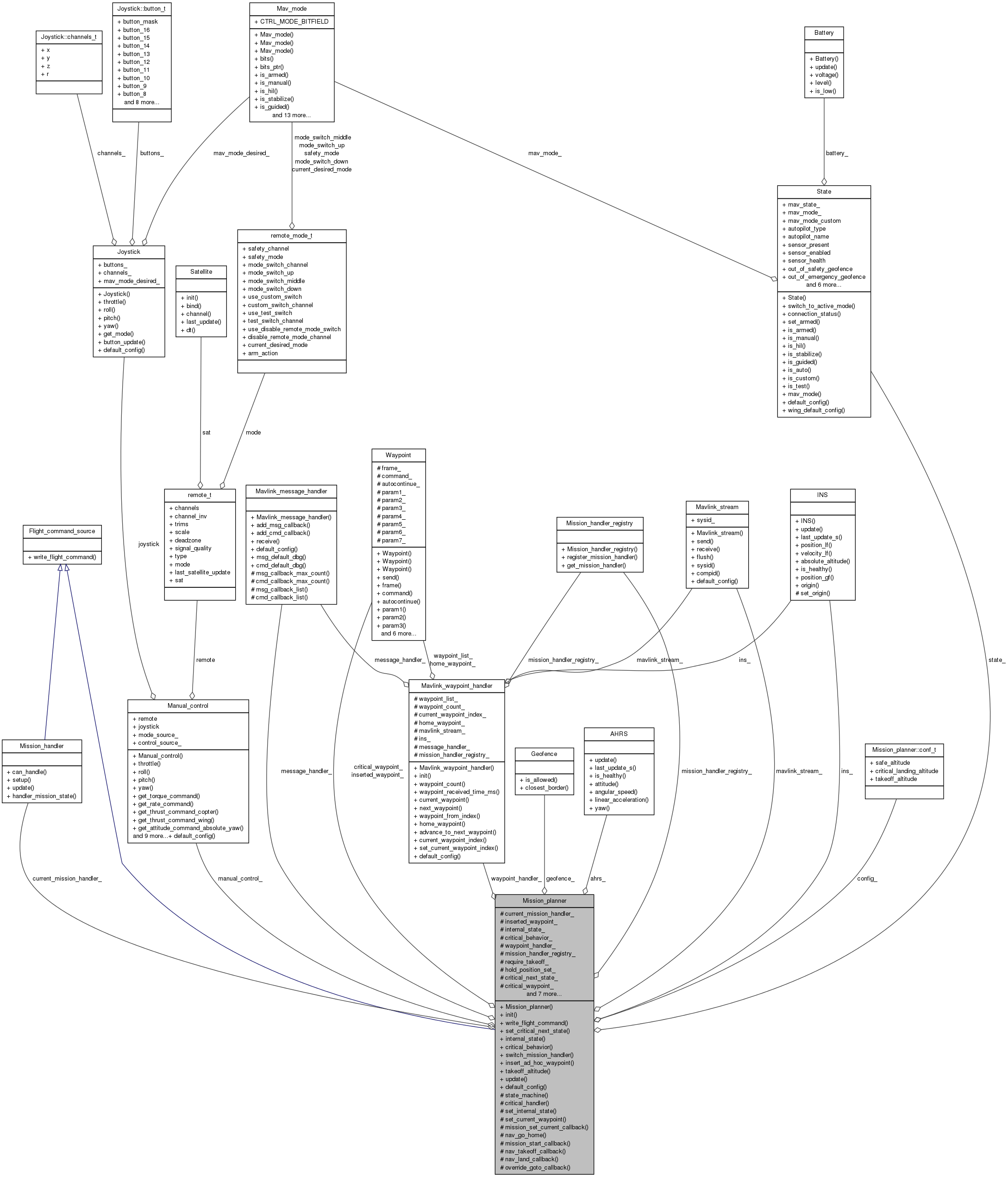
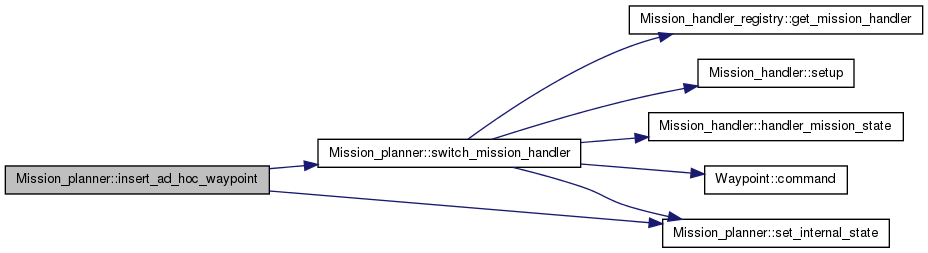
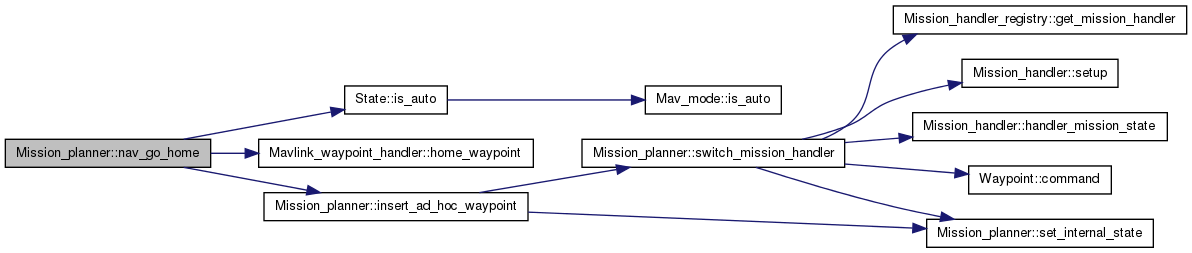
| bool | insert_ad_hoc_waypoint (Waypoint wpt) |
| Inserts the inputted waypoint into the mission. | |
| float & | takeoff_altitude () |
| Gets the reference to the takeoff altitude. | |
Static Public Member Functions | |
| static bool | update (Mission_planner *mission_planner) |
| The mission planner tasks, gives a goal for the navigation module. | |
| static conf_t | default_config () |
| Default configuration. | |
Protected Member Functions | |
| void | state_machine () |
| State machine to drive the navigation module. | |
| void | critical_handler () |
| Drives the critical navigation behavior. | |
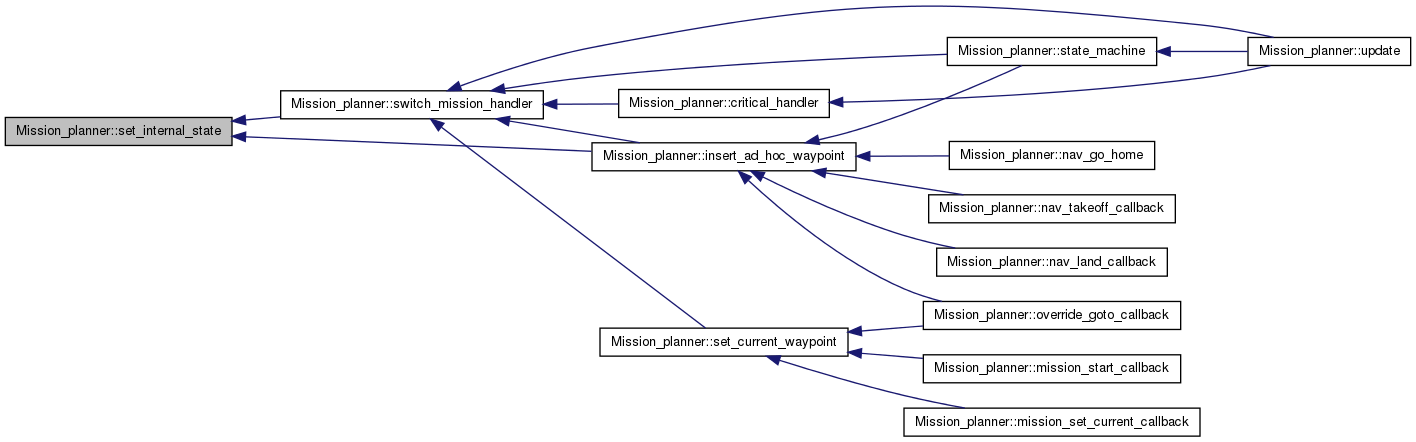
| void | set_internal_state (internal_state_t new_internal_state) |
| Sets the internal state based on default waypoints. | |
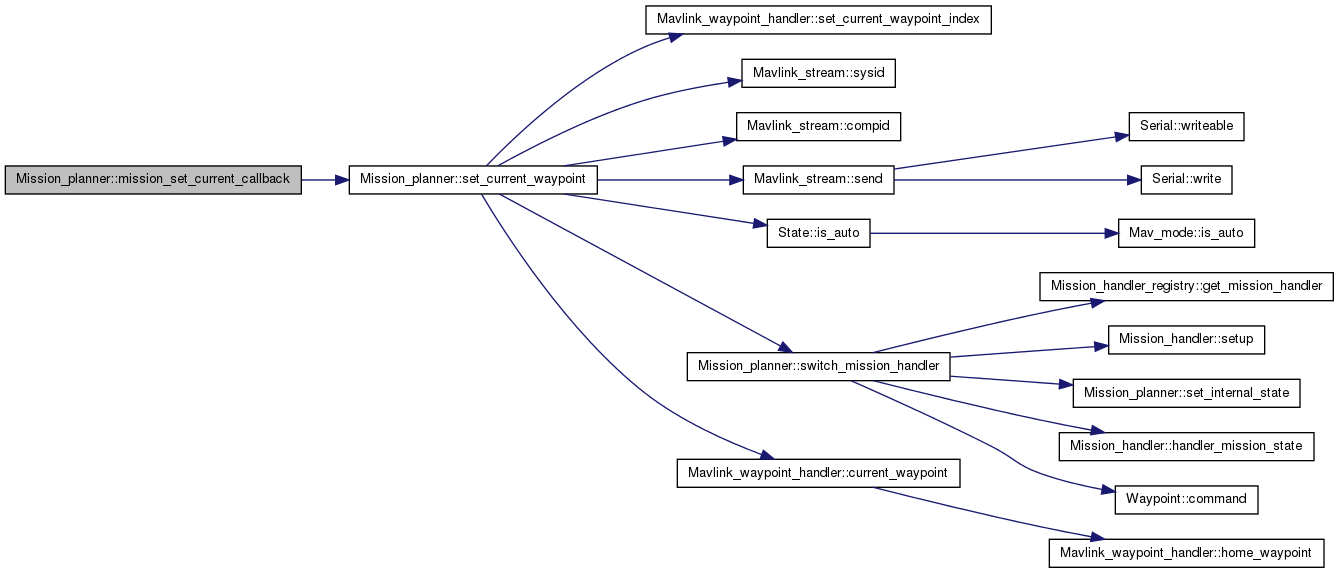
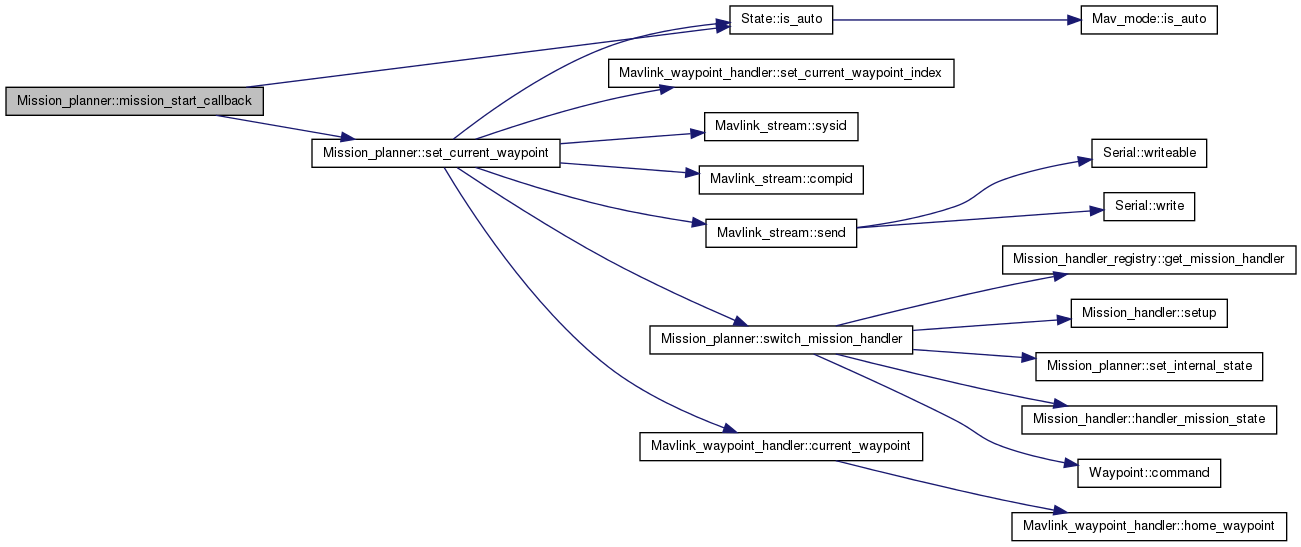
| bool | set_current_waypoint (uint16_t index) |
| Sets the current waypoint to num_of_waypoint. | |
Static Protected Member Functions | |
| static void | mission_set_current_callback (Mission_planner *mission_planner, uint32_t sysid, const mavlink_message_t *msg) |
| Set the current waypoint to new_current. | |
| static mav_result_t | nav_go_home (Mission_planner *mission_planner, const mavlink_command_long_t *packet) |
| Navigate to the home position and hold. | |
| static mav_result_t | mission_start_callback (Mission_planner *mission_planner, const mavlink_command_long_t *packet) |
| Starts the mission. | |
| static mav_result_t | nav_takeoff_callback (Mission_planner *mission_planner, const mavlink_command_long_t *packet) |
| Sets auto-takeoff procedure from a MAVLink command message MAV_CMD_NAV_TAKEOFF. | |
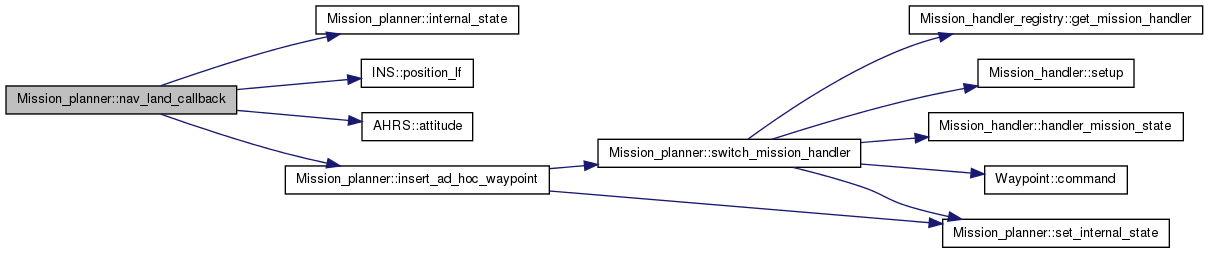
| static mav_result_t | nav_land_callback (Mission_planner *mission_planner, const mavlink_command_long_t *packet) |
| Drives the auto landing procedure from the MAV_CMD_NAV_LAND message long. | |
| static mav_result_t | override_goto_callback (Mission_planner *mission_planner, const mavlink_command_long_t *packet) |
| Pauses the navigation or resumes/advances the navigation waypoint. | |
Protected Attributes | |
| Mission_handler * | current_mission_handler_ |
| The currently used mission handler. | |
| Waypoint | inserted_waypoint_ |
| A waypoint that is inserted into the plan outside of the normal mission. | |
| internal_state_t | internal_state_ |
| The internal state of the navigation module. | |
| critical_behavior_enum | critical_behavior_ |
| The critical behavior enum. | |
| Mavlink_waypoint_handler & | waypoint_handler_ |
| The reference to the mavlink waypoint handler. | |
| Mission_handler_registry & | mission_handler_registry_ |
| The reference to the mission handler registry. | |
| bool | require_takeoff_ |
| Flag stating if we require takeoff when switching to auto, set when not auto. | |
| bool | hold_position_set_ |
| Flag stating if the pilot has specifically switched to hold position. | |
| bool | critical_next_state_ |
| Flag to change critical state in its dedicated state machine. | |
| Waypoint | critical_waypoint_ |
| Waypoint for the critical state. | |
| const Mavlink_stream & | mavlink_stream_ |
| The reference to MAVLink stream. | |
| State & | state_ |
| The reference to the state structure. | |
| INS & | ins_ |
| The reference to the ins structure. | |
| const AHRS & | ahrs_ |
| The reference to the attitude estimation structure. | |
| const Manual_control & | manual_control_ |
| The reference to the manual_control structure. | |
| const Geofence & | geofence_ |
| The reference to the geofence structure. | |
| Mavlink_message_handler & | message_handler_ |
| The reference to the mavlink message handler. | |
| conf_t | config_ |
| Mission_planner::Mission_planner | ( | INS & | ins, |
| const AHRS & | ahrs, | ||
| State & | state, | ||
| const Manual_control & | manual_control, | ||
| const Geofence & | geofence, | ||
| Mavlink_message_handler & | message_handler, | ||
| const Mavlink_stream & | mavlink_stream, | ||
| Mavlink_waypoint_handler & | waypoint_handler, | ||
| Mission_handler_registry & | mission_handler_registry, | ||
| conf_t | config = default_config() |
||
| ) |
Initialize the waypoint handler.
| ins | The reference to the ins structure |
| ahrs | The reference to the attitude estimation structure |
| state | The reference to the state structure |
| manual_control | The reference to the manual control structure |
| geofence | The reference to the geofence structure |
| mavlink_communication | The reference to the MAVLink communication structure |
| mavlink_stream | The reference to the MAVLink stream structure |
| waypoint_handler | The handler for the waypoints |
| mission_handler_registry | The reference to the mission handler registry |
Returns the critical behavior.
| Mission_planner::conf_t Mission_planner::default_config | ( | void | ) | [inline, static] |
Default configuration.
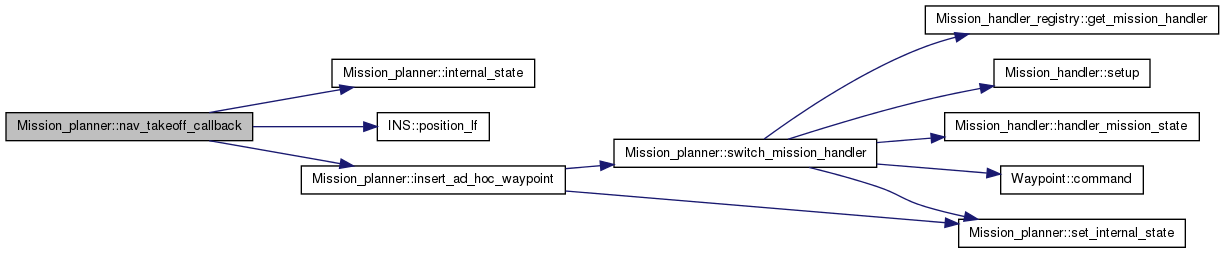
| bool Mission_planner::insert_ad_hoc_waypoint | ( | Waypoint | wpt | ) |
Inserts the inputted waypoint into the mission.
This inserts a waypoint into the mission and sets the internal state to paused. If the insert fails, the function returns false and does not set the mission handler or inserted waypoint
| wpt | The waypoint |
| Mission_planner::internal_state_t Mission_planner::internal_state | ( | ) | const |
Gets the internal state.
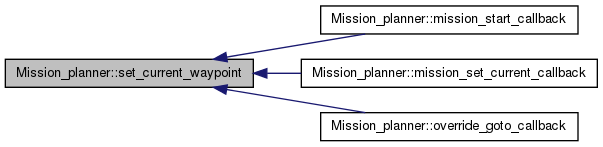
| void Mission_planner::mission_set_current_callback | ( | Mission_planner * | mission_planner, |
| uint32_t | sysid, | ||
| const mavlink_message_t * | msg | ||
| ) | [static, protected] |
Set the current waypoint to new_current.
| mission_planner | The pointer to the mission planner class |
| sysid | The system ID |
| msg | The received MAVLink message structure with the number of the current waypoint |
| mav_result_t Mission_planner::mission_start_callback | ( | Mission_planner * | mission_planner, |
| const mavlink_command_long_t * | packet | ||
| ) | [static, protected] |
Starts the mission.
| mission_planner | The pointer to the mission planner class |
| sysid | The system ID |
| msg | The received MAVLink message structure with the number of the current waypoint |
| mav_result_t Mission_planner::nav_go_home | ( | Mission_planner * | mission_planner, |
| const mavlink_command_long_t * | packet | ||
| ) | [static, protected] |
Navigate to the home position and hold.
N.B. Intentionally mislabelled to go to home, not return to launch
| mission_planner | The pointer to the object of the Mission planner takeoff handler |
| packet | The pointer to the structure of the MAVLink command message long |
| mav_result_t Mission_planner::nav_land_callback | ( | Mission_planner * | mission_planner, |
| const mavlink_command_long_t * | packet | ||
| ) | [static, protected] |
Drives the auto landing procedure from the MAV_CMD_NAV_LAND message long.
| mission_planner | The pointer to the structure of the MAVLink waypoint handler |
| packet | The pointer to the structure of the MAVLink command message long |
| mav_result_t Mission_planner::nav_takeoff_callback | ( | Mission_planner * | mission_planner, |
| const mavlink_command_long_t * | packet | ||
| ) | [static, protected] |
Sets auto-takeoff procedure from a MAVLink command message MAV_CMD_NAV_TAKEOFF.
| mission_planner | The pointer to the object of the Mission planner takeoff handler |
| packet | The pointer to the structure of the MAVLink command message long |
| mav_result_t Mission_planner::override_goto_callback | ( | Mission_planner * | mission_planner, |
| const mavlink_command_long_t * | packet | ||
| ) | [static, protected] |
Pauses the navigation or resumes/advances the navigation waypoint.
| navigating_handler | The pointer to the structure of the navigating handler |
| packet | The pointer to the structure of the MAVLink command message long |
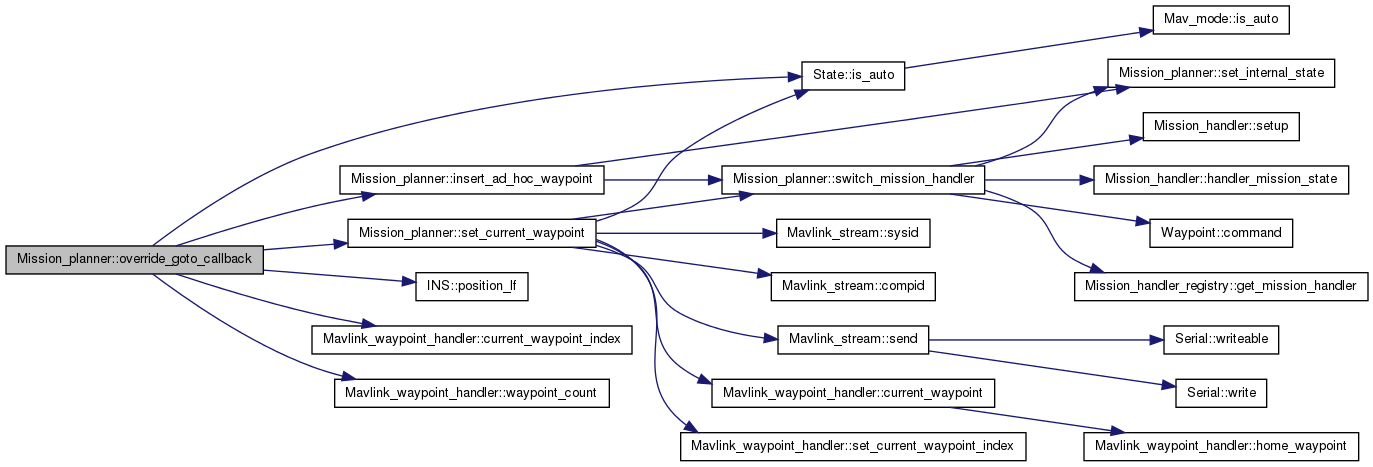
| bool Mission_planner::set_current_waypoint | ( | uint16_t | index | ) | [protected] |
Sets the current waypoint to num_of_waypoint.
| sysid | The system ID |
| msg | The received MAVLink message structure with the number of the current waypoint |

| void Mission_planner::set_internal_state | ( | internal_state_t | new_internal_state | ) | [protected] |
Sets the internal state based on default waypoints.
THIS SHOULD NOT BE SET AS A METHOD TO CHANGE THE MISSION HANDLER! USE Mission_planner::switch_mission_handler() or Mission_planner::insert_ad_hoc_waypoint()
| new_internal_state | The new internal state |
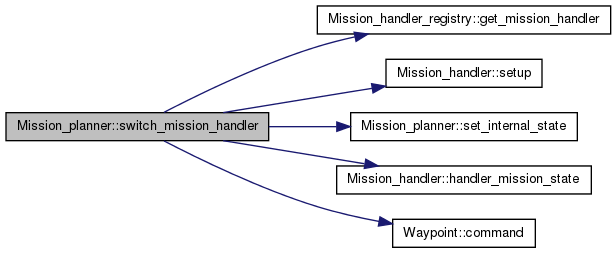
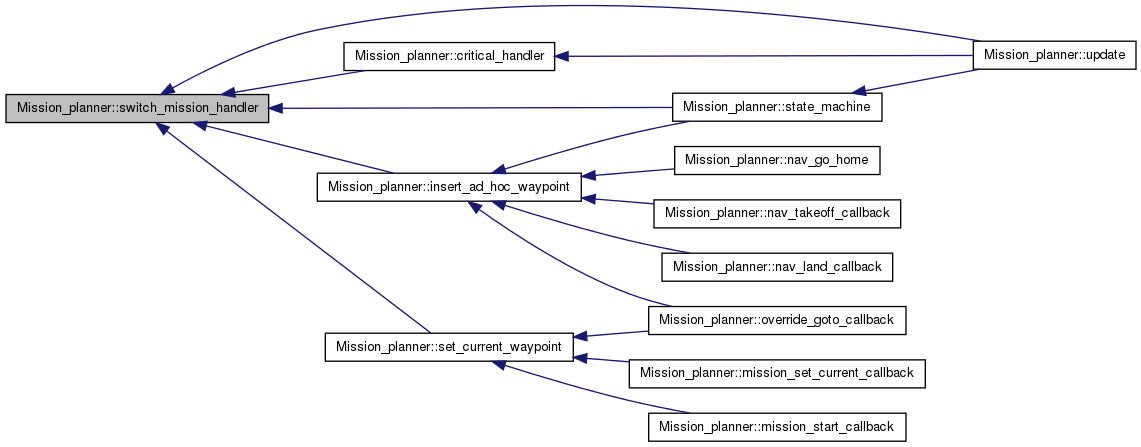
| bool Mission_planner::switch_mission_handler | ( | const Waypoint & | waypoint | ) |
Switches the mission handler to the inputted waypoint.
The current mission handler is set based on the inputted waypoint. If the mission handler could not be setup or found, no change is made to the current mission handler
| waypoint |
| float& Mission_planner::takeoff_altitude | ( | ) | [inline] |
Gets the reference to the takeoff altitude.
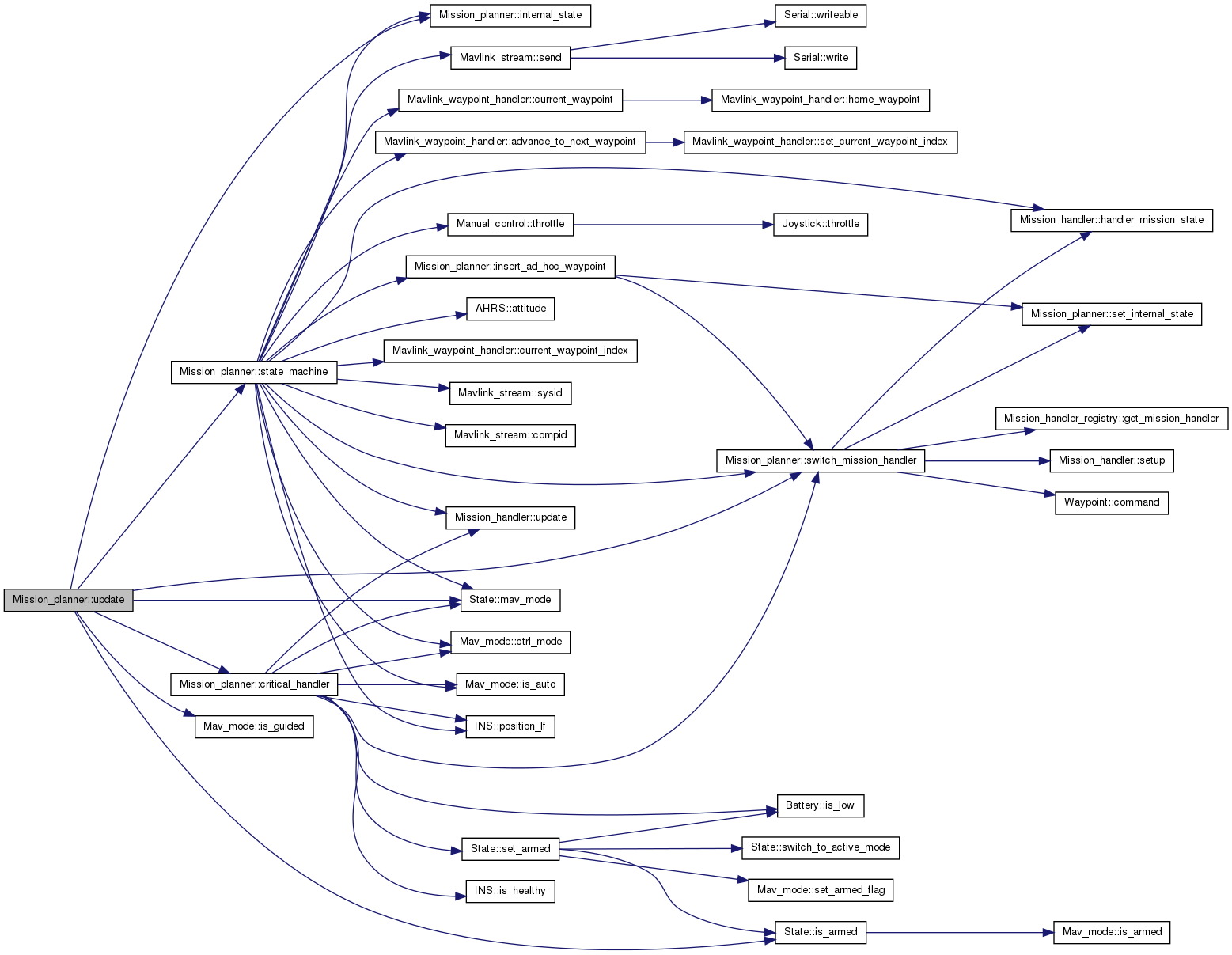
| bool Mission_planner::update | ( | Mission_planner * | mission_planner | ) | [static] |
The mission planner tasks, gives a goal for the navigation module.
| mission_planner | The pointer to the waypoint handler structure |
| bool Mission_planner::write_flight_command | ( | Flight_controller & | flight_controller | ) | const [virtual] |
Provides control commands to the flight controller.
Implements Flight_command_source.

 1.7.6.1
1.7.6.1

