|
MAV'RIC
|
|
MAV'RIC
|
Structure containing the pointers to the data needed in this module. More...
#include <stabilisation_wing.hpp>
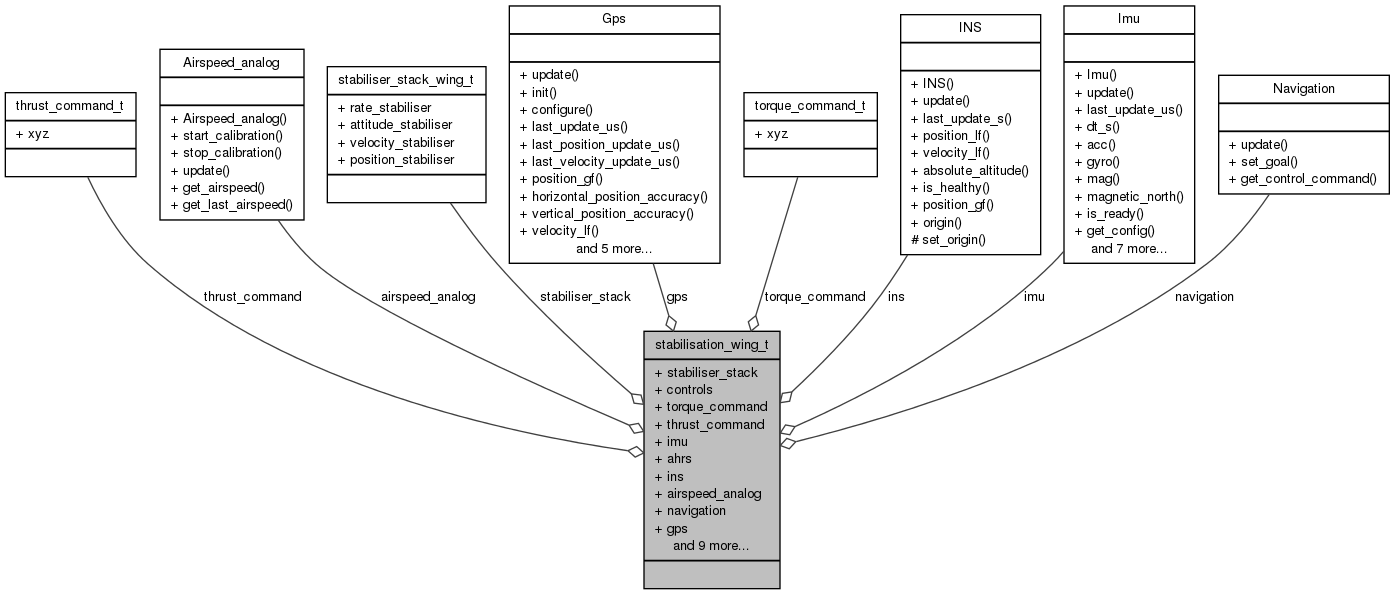
Public Attributes | |
| stabiliser_stack_wing_t | stabiliser_stack |
| The pointer to the PID parameters values for the stacked controller. | |
| control_command_t * | controls |
| The pointer to the control structure. | |
| torque_command_t * | torque_command |
| The pointer to the torque command (output) | |
| thrust_command_t * | thrust_command |
| The pointer to the thrust command (output) | |
| const Imu * | imu |
| The pointer to the IMU structure. | |
| const ahrs_t * | ahrs |
| The pointer to the attitude estimation structure. | |
| const INS * | ins |
| The pointer to the position estimation structure. | |
| const Airspeed_analog * | airspeed_analog |
| The pointer to the analog airspeed sensor structure. | |
| const Navigation * | navigation |
| The pointer to the navigation structure. | |
| const Gps * | gps |
| The pointer to the GPS structure. | |
| float | thrust_apriori |
| A priori on the thrust for velocity control. | |
| float | pitch_angle_apriori |
| Constant a priori on the pitch angle. | |
| float | pitch_angle_apriori_gain |
| Gain of the pitch angle a priori which is function of the roll value. | |
| float | max_roll_angle |
| Maximum roll value that the velocity layer could ask to follow. | |
| float | take_off_thrust |
| Thrust value used during the take-off. | |
| float | take_off_pitch |
| Pitch angle used during the take-off. | |
| float | landing_pitch |
| Pitch angle used during the landing. | |
| float | landing_max_roll |
| Maximum roll angle during landing. | |
| float | dt_s |
| Time interval between to updates. | |
| float | last_update_s |
| Last update in seconds. | |
Structure containing the pointers to the data needed in this module.
 1.7.6.1
1.7.6.1

