|
MAV'RIC
|
Public Attributes | |
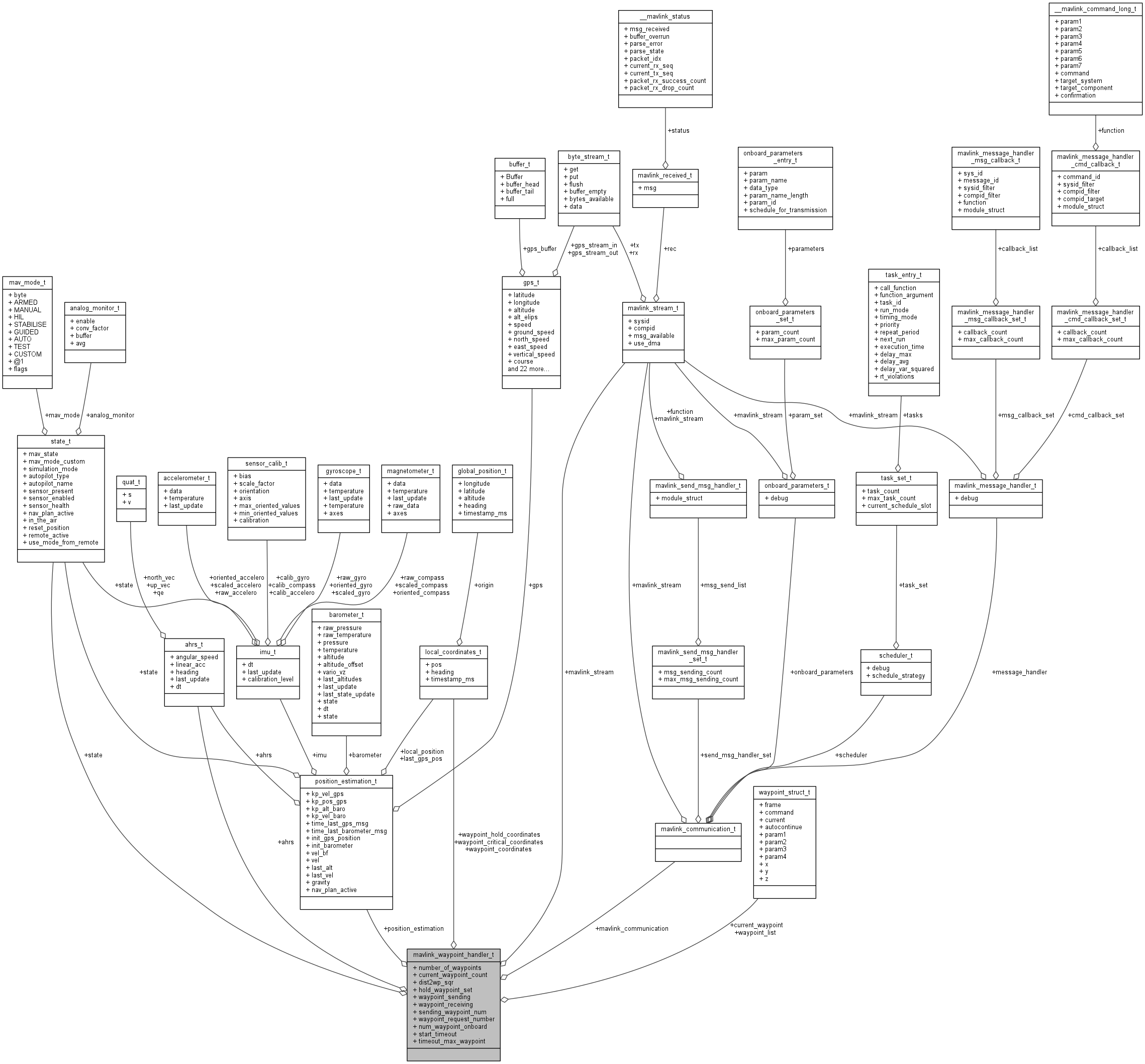
| waypoint_struct_t | waypoint_list [MAX_WAYPOINTS] |
| The array of all waypoints (max MAX_WAYPOINTS) | |
| waypoint_struct_t | current_waypoint |
| The structure of the current waypoint. | |
| uint16_t | number_of_waypoints |
| The total number of waypoints. | |
| int8_t | current_waypoint_count |
| The number of the current waypoint. | |
| local_coordinates_t | waypoint_coordinates |
| The coordinates of the waypoint in GPS navigation mode (MAV_MODE_AUTO_ARMED) | |
| local_coordinates_t | waypoint_hold_coordinates |
| The coordinates of the waypoint in position hold mode (MAV_MODE_GUIDED_ARMED) | |
| local_coordinates_t | waypoint_critical_coordinates |
| The coordinates of the waypoint in critical state. | |
| float | dist2wp_sqr |
| The square of the distance to the waypoint. | |
| bool | hold_waypoint_set |
| Flag to tell if the hold position waypoint is set. | |
| bool | waypoint_sending |
| Flag to tell whether waypoint are being sent. | |
| bool | waypoint_receiving |
| Flag to tell whether waypoint are being received or not. | |
| int32_t | sending_waypoint_num |
| The ID number of the sending waypoint. | |
| int32_t | waypoint_request_number |
| The ID number of the requested waypoint. | |
| uint16_t | num_waypoint_onboard |
| The number of waypoint onboard. | |
| uint32_t | start_timeout |
| The start time for the waypoint timeout. | |
| uint32_t | timeout_max_waypoint |
| The max waiting time for communication. | |
| position_estimation_t * | position_estimation |
| The pointer to the position estimation structure. | |
| const ahrs_t * | ahrs |
| The pointer to the attitude estimation structure. | |
| state_t * | state |
| The pointer to the state structure. | |
| mavlink_communication_t * | mavlink_communication |
| The pointer to the MAVLink communication structure. | |
| const mavlink_stream_t * | mavlink_stream |
| Pointer to MAVLink stream. | |
 1.8.9.1
1.8.9.1

