|
MAV'RIC
|
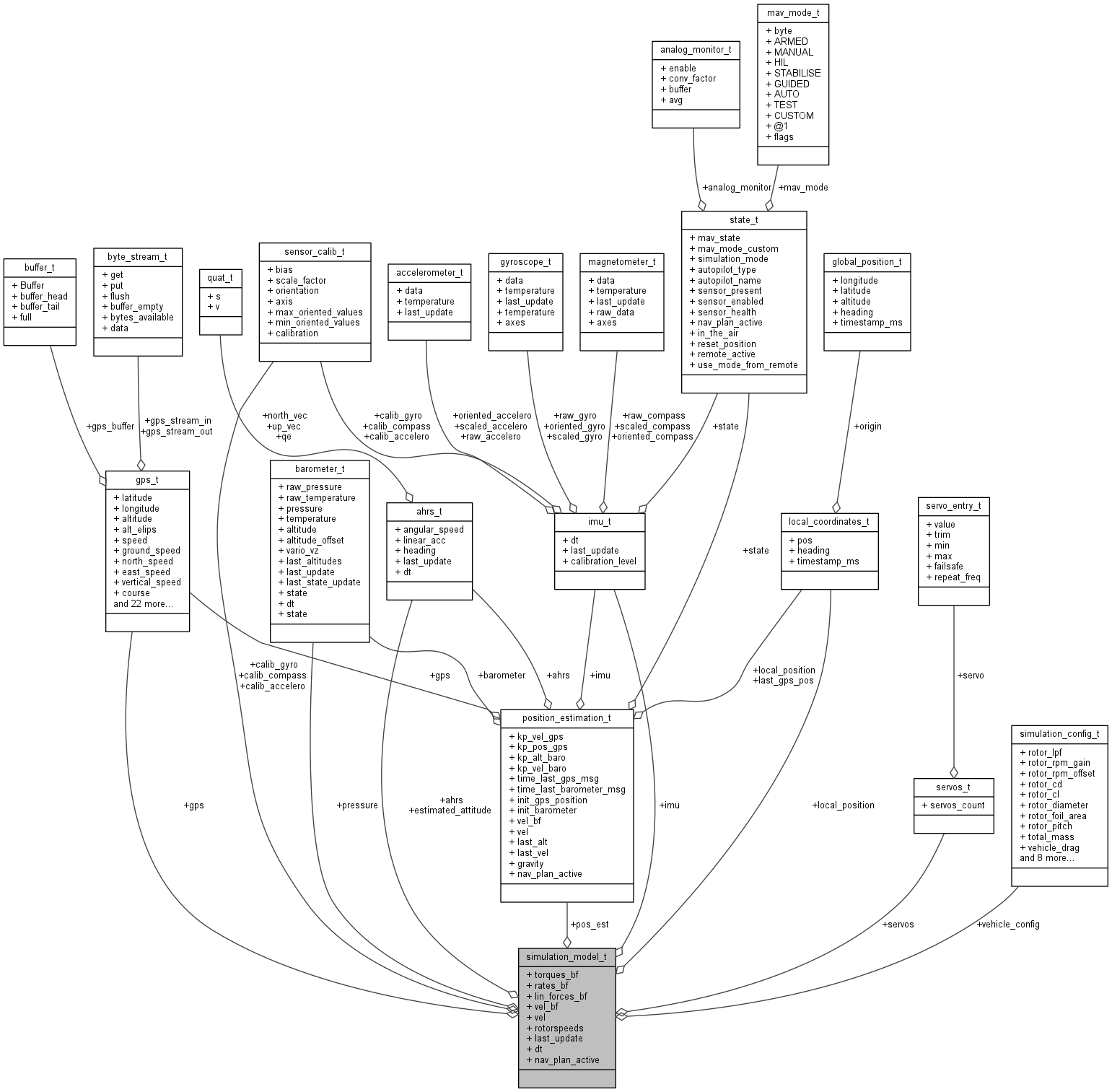
The simulation model structure definition. More...
#include <simulation.h>
Public Attributes | |
| float | torques_bf [3] |
| The 3D torques vector applied on the vehicle. | |
| float | rates_bf [3] |
| The 3D angular rates vector. | |
| float | lin_forces_bf [3] |
| The 3D linear forces vector in body frame. | |
| float | vel_bf [3] |
| The 3D velocity vector in body frame. | |
| float | vel [3] |
| The 3D velocity vector in NED frame. | |
| ahrs_t | ahrs |
| The simulated attitude estimation. | |
| local_coordinates_t | local_position |
| The simulated local position. | |
| sensor_calib_t | calib_gyro |
| The calibration values of the gyroscope. | |
| sensor_calib_t | calib_accelero |
| The calibration values of the accelerometer. | |
| sensor_calib_t | calib_compass |
| The calibration values of the compass. | |
| float | rotorspeeds [ROTORCOUNT] |
| The estimated rotor speeds. | |
| simulation_config_t | vehicle_config |
| The vehicle configuration variables. | |
| uint32_t | last_update |
| The last update in system ticks. | |
| float | dt |
| The time base of current update. | |
| imu_t * | imu |
| The pointer to the IMU structure. | |
| position_estimation_t * | pos_est |
| The pointer to the position estimation structure. | |
| barometer_t * | pressure |
| The pointer to the barometer structure. | |
| gps_t * | gps |
| The pointer to the GPS structure. | |
| const servos_t * | servos |
| The pointer to the servos structure. | |
| const ahrs_t * | estimated_attitude |
| The pointer to the attitude estimation structure. | |
| bool * | nav_plan_active |
| The pointer to the waypoint set flag. | |
The simulation model structure definition.
 1.8.9.1
1.8.9.1

