Altitude estimator.
More...
#include <ins_kf.hpp>
List of all members.
Classes |
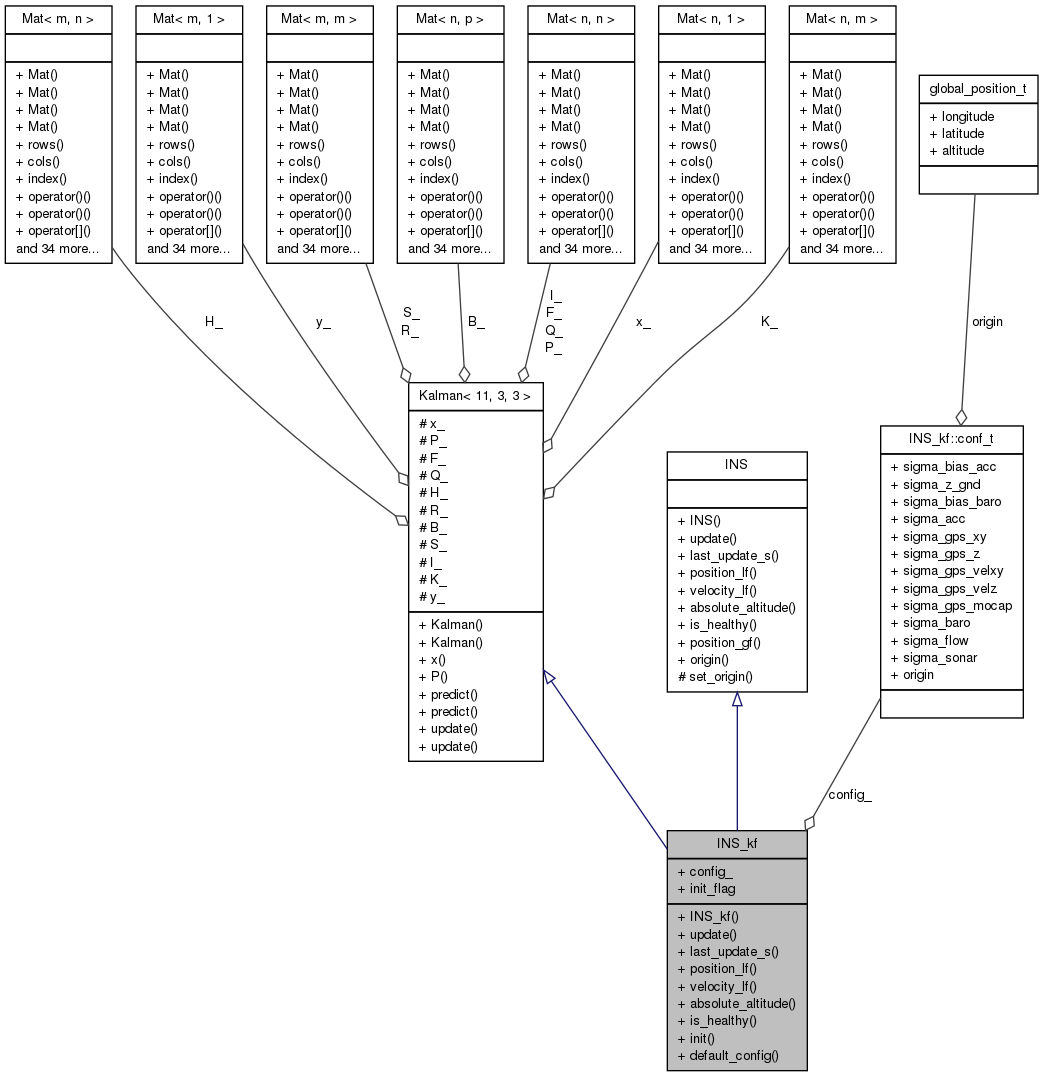
| struct | conf_t |
| | Configuration structure. More...
|
Public Member Functions |
|
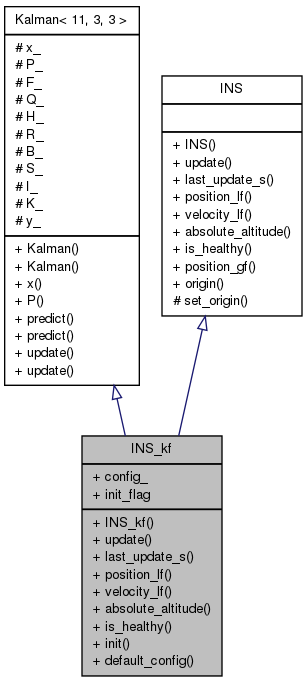
| INS_kf (State &state, const Gps &gps, const Gps_mocap &gps_mocap, const Barometer &barometer, const Sonar &sonar, const PX4Flow &flow, const AHRS &ahrs, const conf_t config=default_config()) |
| | Constructor.
|
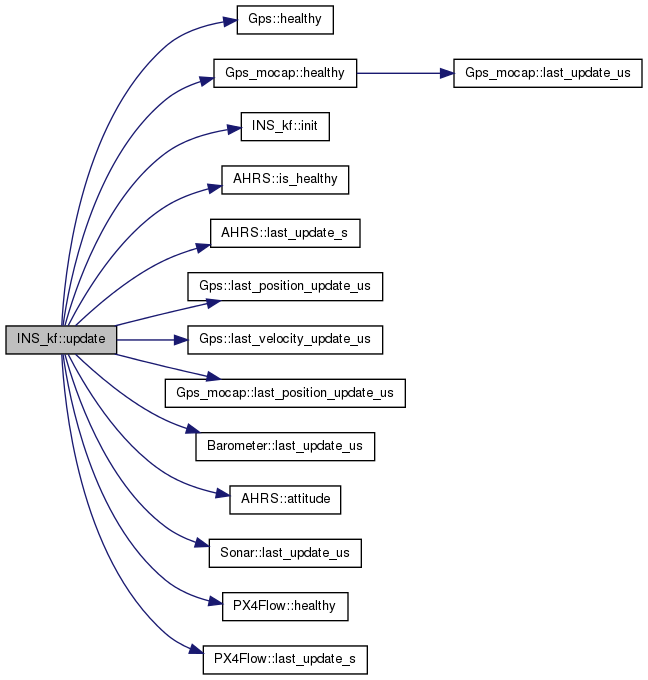
| bool | update (void) |
| | Main update function.
|
| float | last_update_s (void) const |
| | Last update in seconds.
|
| std::array< float, 3 > | position_lf (void) const |
| | 3D Position in meters (NED frame)
|
| std::array< float, 3 > | velocity_lf (void) const |
| | Velocity in meters/seconds in NED frame.
|
| float | absolute_altitude (void) const |
| | Absolute altitude above sea level in meters (>=0)
|
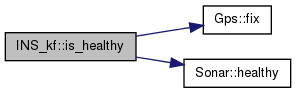
| bool | is_healthy (INS::healthy_t type) const |
| | Indicates which estimate can be trusted.
|
|
void | init (void) |
| | Initialize/reset the kalman filter.
|
Static Public Member Functions |
|
static INS_kf::conf_t | default_config (void) |
| | Default configuration structure.
|
Public Attributes |
|
conf_t | config_ |
| | Configuration (public, to be used as onboard param)
|
|
uint32_t | init_flag |
| | Flag used to force initialization by telemetry (0 no init, otherwise init)
|
Friends |
|
void | ins_telemetry_send (const INS_kf *ins, const Mavlink_stream *mavlink_stream, mavlink_message_t *msg) |
Detailed Description
Altitude estimator.
- state vector X (n=11): X = [ x_ned, y_ned, z_ned, z_ground_ned, vx, vy, vz, bias_accx, bias_accy, bias_accz bias_baro ]
- model A = [ 1, 0, 0, 0, dt, 0, 0, -(1/2)*alpha_x*(dt^2), -(1/2)*beta_x*(dt^2), -(1/2)*gamma_x*(dt^2), 0 ] // Pos x integrated with vel and inclue acc biases in global ref [ 0, 1, 0, 0, 0, dt, 0, -(1/2)*alpha_y*(dt^2), -(1/2)*beta_y*(dt^2), -(1/2)*gamma_y*(dt^2), 0 ] // Pos y integrated with vel and inclue acc biases in global ref [ 0, 0, 1, 0, 0, 0, dt, -(1/2)*alpha_z*(dt^2), -(1/2)*beta_z*(dt^2), -(1/2)*gamma_z*(dt^2), 0 ] // Pos z integrated with vel and inclue acc biases in global ref [ 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0 ] // Ground alt (cst) [ 0, 0, 0, 0, 1, 0, 0, -alpha_x*dt, -beta_x*dt, -gamma_x*dt, 0 ] // Vel x include acc bias in global ref [ 0, 0, 0, 0, 0, 1, 0, -alpha_y*dt, -beta_y*dt, -gamma_y*dt, 0 ] // Vel y include acc bias in global ref [ 0, 0, 0, 0, 0, 0, 1, -alpha_z*dt, -beta_z*dt, -gamma_z*dt, 0 ] // Vel z include acc bias in global ref [ 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0 ] // Acc x bias (cst) [ 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0 ] // Acc y bias (cst) [ 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0 ] // Acc z bias (cst) [ 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1 ] // baro bias (cst) with: alpha_x = q0^2 + q1^2 - q2^2 - q3^2 (using attitude quaternion q = (q0, q1, q2, q3)') beta_x = 2*(-q0*q3 + q1*q2) gamma_x = 2*(q0*q2 + q1*q3) alpha_y = 2*(q0*q3 + q1*q2) beta_y = q0^2 - q1^2 + q2^2 - q3^2 gamma_y = 2*(-q0*q1 + q2*q3) alpha_z = 2*(-q0*q2 + q1*q3) beta_z = 2*(q0*q1 + q2*q3) gamma_z = q0^2 - q1^2 - q2^2 - q3^2
- input u (p=3): u = [ ax, ay, az ] // Accelerations in body frame
- input model B = [ (1/2)*alpha_x*(dt^2), (1/2)*beta_x*(dt^2), (1/2)*gamma_x*(dt^2) ] [ (1/2)*alpha_y*(dt^2), (1/2)*beta_y*(dt^2), (1/2)*gamma_y*(dt^2) ] [ (1/2)*alpha_z*(dt^2), (1/2)*beta_z*(dt^2), (1/2)*gamma_z*(dt^2) ] [ 0, 0, 0 ] [ alpha_x*dt, beta_x*dt, gamma_x*dt ] [ alpha_y*dt, beta_y*dt, gamma_y*dt ] [ alpha_z*dt, beta_z*dt, gamma_z*dt ] [ 0, 0, 0 ] [ 0, 0, 0 ] [ 0, 0, 0 ] [ 0, 0, 0 ]
- measurement 1 (gps) : z1 = [ x_ned, y_ned, z_ned ] H1 = [ 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0 ] [ 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0 ] [ 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0 ]
- measurement 2 (gps) : z2 = [ vx, vy, vz ] H2 = [ 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0 ] [ 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0 ] [ 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0 ]
- measurement 3 (baro): z3 = [ -z_ned - bias_baro ] H3 = [ 0, 0, -1, 0, 0, 0, 0, 0, 0, 0, -1 ]
- measurement 4 (sonar): z4 = [ -z_ned + z_ground_ned ] H4 = [ 0, 0, -1, 1, 0, 0, 0, 0, 0, 0, 0 ]
Member Function Documentation
Absolute altitude above sea level in meters (>=0)
- Returns:
- altitude
Implements INS.
Indicates which estimate can be trusted.
- Parameters:
-
- Returns:
- boolean
Implements INS.
Last update in seconds.
- Returns:
- time
Implements INS.
3D Position in meters (NED frame)
- Returns:
- position
Implements INS.
Main update function.
- Returns:
- Success
Implements INS.
Velocity in meters/seconds in NED frame.
- Returns:
- velocity
Implements INS.
The documentation for this class was generated from the following files:
- /home/travis/build/lis-epfl/MAVRIC_Library/sensing/ins_kf.hpp
- /home/travis/build/lis-epfl/MAVRIC_Library/sensing/ins_kf.cpp

 1.7.6.1
1.7.6.1