|
MAV'RIC
|
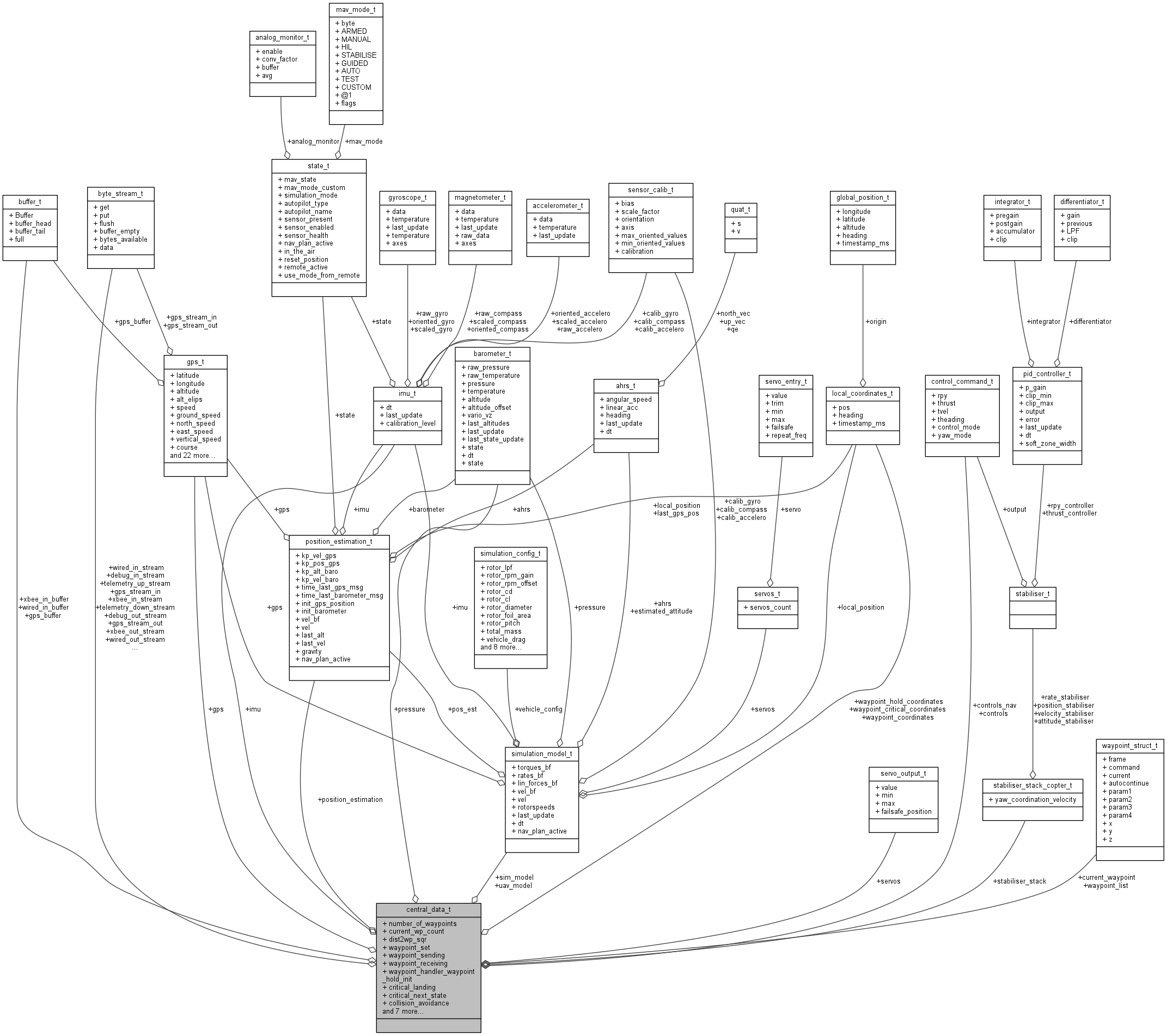
Public Attributes | |
| imu_t | imu |
| control_command_t | controls |
| control_command_t | controls_nav |
| stabiliser_stack_copter_t | stabiliser_stack |
| simulation_model_t | uav_model |
| servo_output_t | servos [NUMBER_OF_SERVO_OUTPUTS] |
| buffer_t | xbee_in_buffer |
| buffer_t | wired_in_buffer |
| byte_stream_t | xbee_out_stream |
| byte_stream_t | xbee_in_stream |
| byte_stream_t | wired_out_stream |
| byte_stream_t | wired_in_stream |
| buffer_t | gps_buffer |
| byte_stream_t | gps_stream_in |
| byte_stream_t | gps_stream_out |
| gps_t | gps |
| simulation_model_t | sim_model |
| position_estimation_t | position_estimation |
| byte_stream_t * | telemetry_down_stream |
| byte_stream_t * | telemetry_up_stream |
| byte_stream_t * | debug_out_stream |
| byte_stream_t * | debug_in_stream |
| waypoint_struct_t | waypoint_list [MAX_WAYPOINTS] |
| waypoint_struct_t | current_waypoint |
| uint16_t | number_of_waypoints |
| int8_t | current_wp_count |
| local_coordinates_t | waypoint_coordinates |
| local_coordinates_t | waypoint_hold_coordinates |
| local_coordinates_t | waypoint_critical_coordinates |
| float | dist2wp_sqr |
| bool | waypoint_set |
| bool | waypoint_sending |
| bool | waypoint_receiving |
| bool | waypoint_handler_waypoint_hold_init |
| bool | critical_landing |
| bool | critical_next_state |
| bool | collision_avoidance |
| bool | automatic_take_off |
| uint8_t | mav_mode |
| uint8_t | mav_state |
| uint8_t | mav_mode_previous |
| uint8_t | mav_state_previous |
| uint32_t | simulation_mode |
| barometer_t | pressure |
| enum CRITICAL_BEHAVIOR_ENUM | critical_behavior |
 1.8.9.1
1.8.9.1

