|
MAV'RIC
|
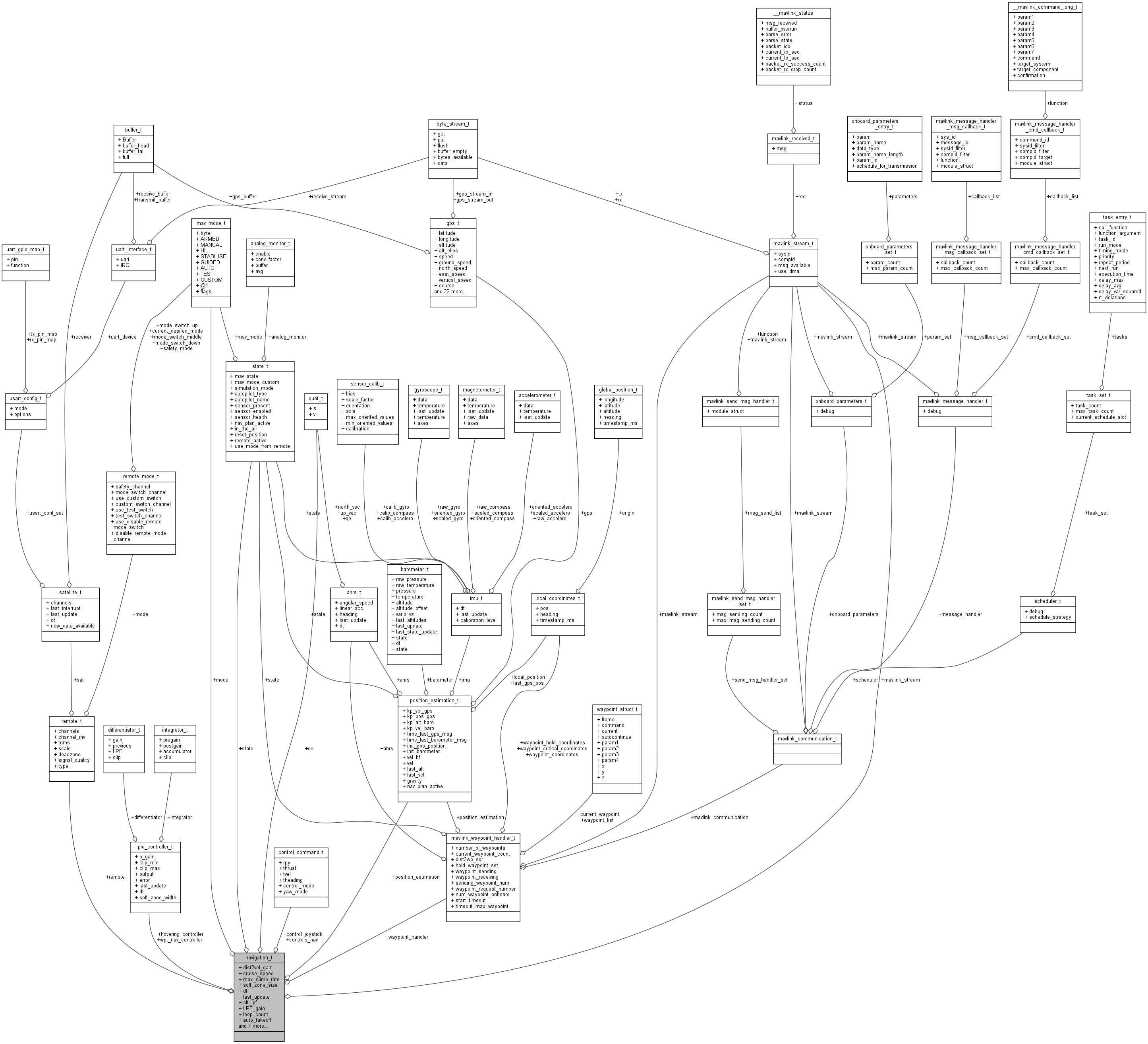
The navigation structure. More...
#include <navigation.h>
Public Attributes | |
| float | dist2vel_gain |
| The gain linking the distance to the goal to the actual speed. | |
| pid_controller_t | hovering_controller |
| hovering controller | |
| pid_controller_t | wpt_nav_controller |
| waypoint navigation controller | |
| float | cruise_speed |
| The cruise speed in m/s. | |
| float | max_climb_rate |
| Max climb rate in m/s. | |
| float | soft_zone_size |
| Soft zone of the velocity controller. | |
| float | dt |
| The time interval between two navigation updates. | |
| uint32_t | last_update |
| The time of the last navigation update in ms. | |
| float | alt_lpf |
| The low-pass filtered altitude for auto-landing. | |
| float | LPF_gain |
| The value of the low-pass filter gain. | |
| uint8_t | loop_count |
| A counter for sending MAVLink messages at a lower rate than the function. | |
| mav_mode_t | mode |
| The mode of the MAV to have a memory of its evolution. | |
| bool | auto_takeoff |
| The flag to start and end the auto takeoff procedure. | |
| bool | auto_landing |
| The flag to start and end the auto landing procedure. | |
| critical_behavior_enum | critical_behavior |
| The critical behavior enum. | |
| auto_landing_behavior_t | auto_landing_behavior |
| The autolanding behavior enum. | |
| bool | critical_next_state |
| Flag to change critical state in its dedicated state machine. | |
| bool | auto_landing_next_state |
| Flag to change critical state in its dedicated state machine. | |
| bool | stop_nav |
| Flag to start/stop the navigation from a button in case of problems. | |
| bool | stop_nav_there |
| Flag to stop the navigation and fly to the stopping waypoint. | |
| control_command_t * | controls_nav |
| The pointer to the navigation control structure. | |
| const control_command_t * | control_joystick |
| The pointer to the joystick control structure. | |
| const quat_t * | qe |
| The pointer to the attitude quaternion structure. | |
| mavlink_waypoint_handler_t * | waypoint_handler |
| The pointer to the waypoint handler structure. | |
| const position_estimation_t * | position_estimation |
| The pointer to the position estimation structure in central_data. | |
| state_t * | state |
| The pointer to the state structure in central_data. | |
| const mavlink_stream_t * | mavlink_stream |
| The pointer to the MAVLink stream structure. | |
| remote_t * | remote |
| The pointer to the remote structure. | |
The navigation structure.
 1.8.9.1
1.8.9.1

