|
MAV'RIC
|
|
MAV'RIC
|
#include <lequad.hpp>
Classes | |
| struct | conf_t |
| Configuration structure. More... | |
Public Member Functions | |
| LEQuad (Imu &imu, Barometer &barometer, Gps &gps, Sonar &sonar, PX4Flow &flow, Serial &serial_mavlink, Satellite &satellite, State_display &state_display, File &file_flash, Battery &battery, File &file1, File &file2, Servo &servo_0, Servo &servo_1, Servo &servo_2, Servo &servo_3, const conf_t &config=default_config()) | |
| Constructor. | |
| bool | init_controller (void) |
Static Public Member Functions | |
| static conf_t | default_config (uint8_t sysid=1) |
| Default configuration. | |
| static conf_t | dronedome_config (uint8_t sysid=1) |
| Configuration for use in drone dome. | |
Protected Attributes | |
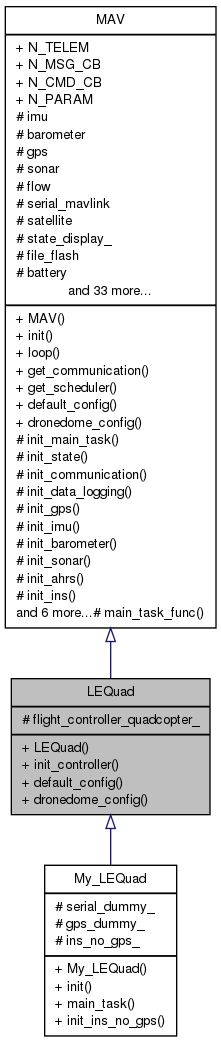
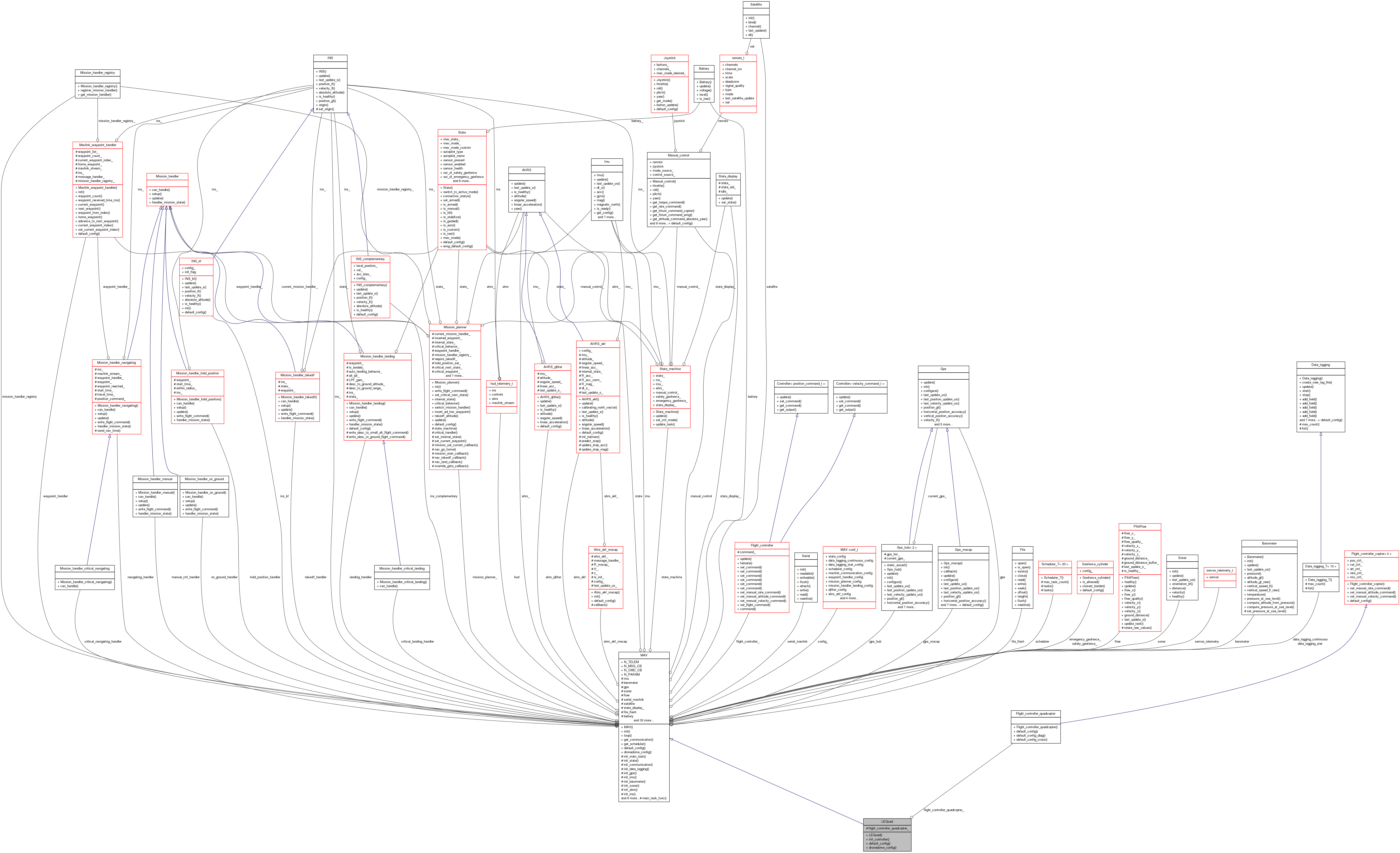
| Flight_controller_quadcopter | flight_controller_quadcopter_ |
MAV class.
| LEQuad::conf_t LEQuad::default_config | ( | uint8_t | sysid = 1 | ) | [inline, static] |
Default configuration.
| sysid | System id (default value = 1) |
Reimplemented from MAV.

| LEQuad::conf_t LEQuad::dronedome_config | ( | uint8_t | sysid = 1 | ) | [inline, static] |
Configuration for use in drone dome.
| sysid | System id (default value = 1) |
Reimplemented from MAV.

 1.7.6.1
1.7.6.1

