|
MAV'RIC
|
|
MAV'RIC
|
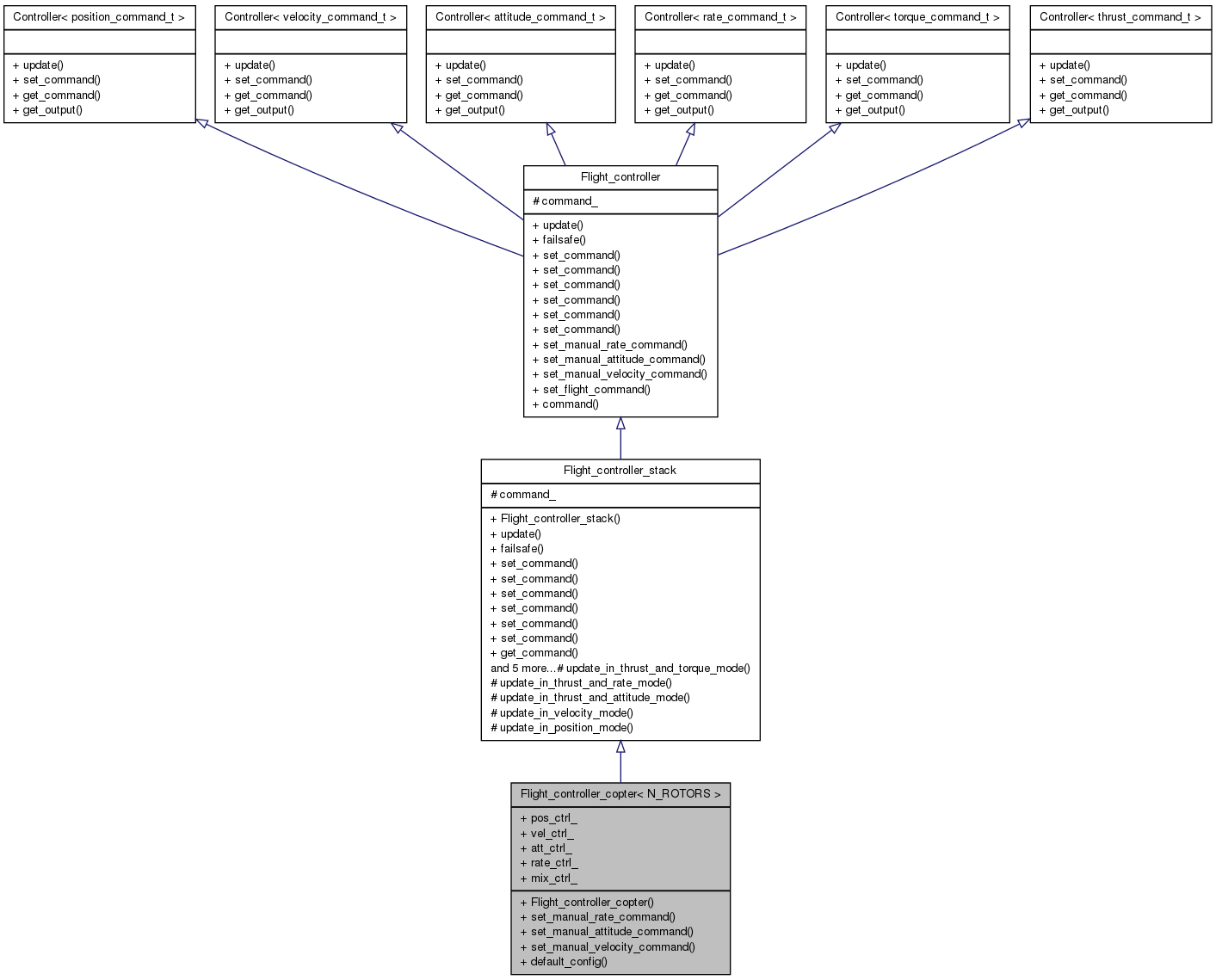
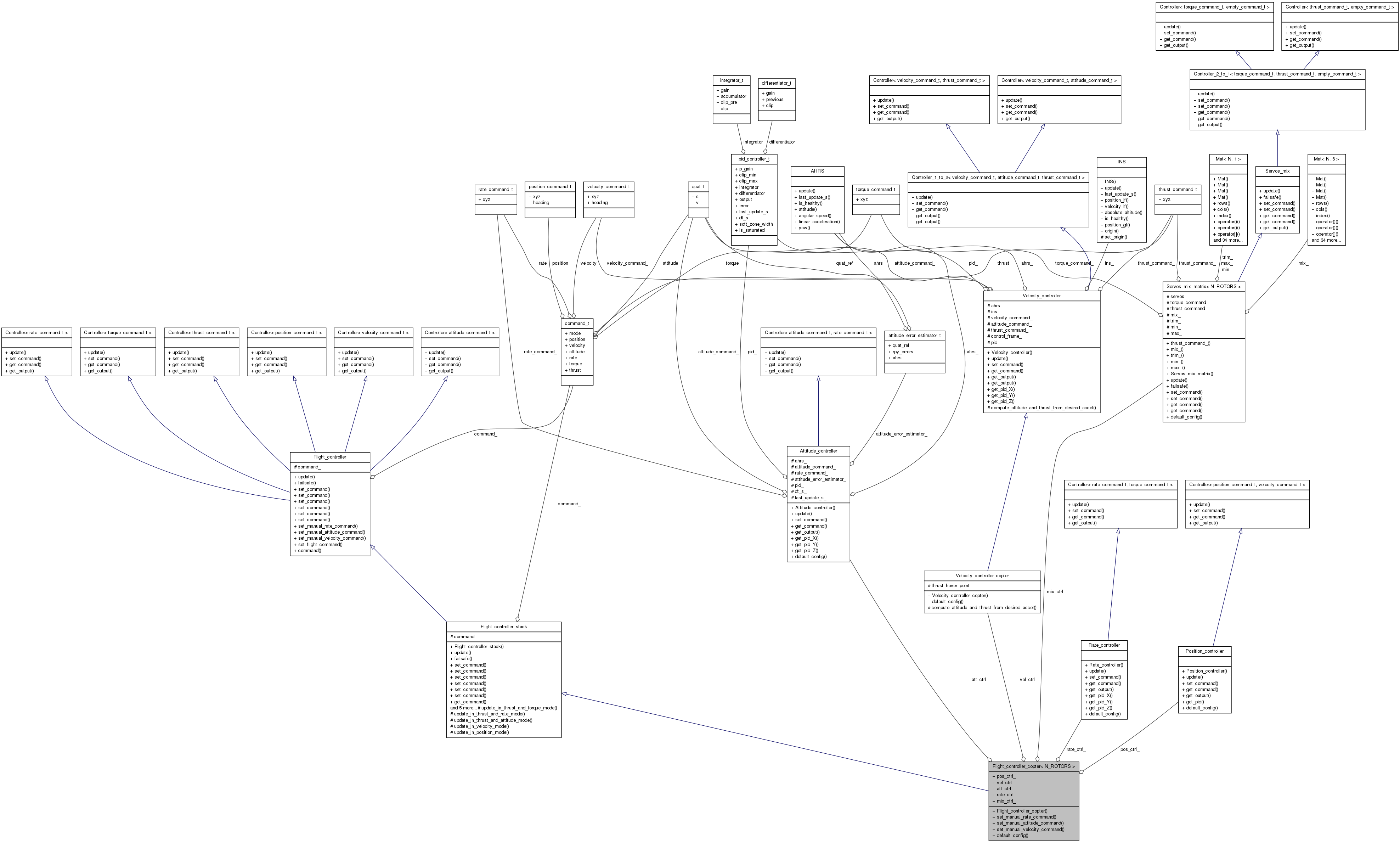
Full flight controller for copter. More...
#include <flight_controller_copter.hpp>
Classes | |
| struct | conf_t |
| Configuration structure. More... | |
Public Member Functions | |
| Flight_controller_copter (const INS &ins, const AHRS &ahrs, typename Servos_mix_matrix< N_ROTORS >::args_t mix_args, conf_t config) | |
| Constructor. | |
| bool | set_manual_rate_command (const Manual_control &manual_control) |
| Set command from manual control in rate mode. | |
| bool | set_manual_attitude_command (const Manual_control &manual_control) |
| Set command from manual control in attitude mode. | |
| bool | set_manual_velocity_command (const Manual_control &manual_control) |
| Set command from manual control in velocity mode. | |
Static Public Member Functions | |
| static conf_t | default_config (void) |
| Default Configuration. | |
Public Attributes | |
| Position_controller | pos_ctrl_ |
| Position controller. | |
| Velocity_controller_copter | vel_ctrl_ |
| Velocity controller. | |
| Attitude_controller | att_ctrl_ |
| Attitude controller. | |
| Rate_controller | rate_ctrl_ |
| Rate controller. | |
| Servos_mix_matrix< N_ROTORS > | mix_ctrl_ |
| Servos mix. | |
Full flight controller for copter.
| N_ROTORS | Number of rotors |
| static conf_t Flight_controller_copter< N_ROTORS >::default_config | ( | void | ) | [inline, static] |
Default Configuration.
/return config
Reimplemented in Flight_controller_hexacopter, and Flight_controller_quadcopter.
| bool Flight_controller_copter< N_ROTORS >::set_manual_attitude_command | ( | const Manual_control & | manual_control | ) | [virtual] |
Set command from manual control in attitude mode.
| manual_control | Reference to manual_control |
Implements Flight_controller.

| bool Flight_controller_copter< N_ROTORS >::set_manual_rate_command | ( | const Manual_control & | manual_control | ) | [virtual] |
Set command from manual control in rate mode.
| manual_control | Reference to manual_control |
Implements Flight_controller.

| bool Flight_controller_copter< N_ROTORS >::set_manual_velocity_command | ( | const Manual_control & | manual_control | ) | [virtual] |
Set command from manual control in velocity mode.
| manual_control | Reference to manual_control |
Implements Flight_controller.

 1.7.6.1
1.7.6.1

